InSight lander will try robotic elbow grease to help stalled heat probe – Astronomy Now Online

After nearly a year trying to coax the InSight Mars lander’s stalled heat probe into hammering its way up to 5 metres (16 feet) below the red planet’s surface, engineers have decided to apply a bit of elbow grease, using the lander’s robot arm to carefully push on the top of the instrument as it attempts to pile drive its way down.
Known familiarly as the “mole,” the Heat Flow and Physical Properties Package, or HP^3, was provided by the German aerospace agency DLR. It is a 40-centimetre-long (16 inch) probe connected to the InSight lander by a cable studded with sensitive temperature sensors. It is designed to hammer its way below the surface, pulling the cable down behind it, to measure the planet’s internal temperature.
But on 28 February 2019, during an initial attempt to dig into the soil at the base of the lander, the mole stalled, tilting to one side as if it had run into a sub-surface rock or some other feature. Engineers later determined that instead of the expected loose, sand-like soil, the mole had run into a layer of denser, cemented soil.
The mole was designed to take advantage of friction provided by looser soil to keep from simply bouncing in place as its internal hammer mechanism cycles. Last summer, engineers tried using InSight’s robot arm to press down on the soil beside the mole, “pinning” it enough to provide the necessary friction. But on two occasions, the instrument popped back up, possibly because of soil building up underneath it.
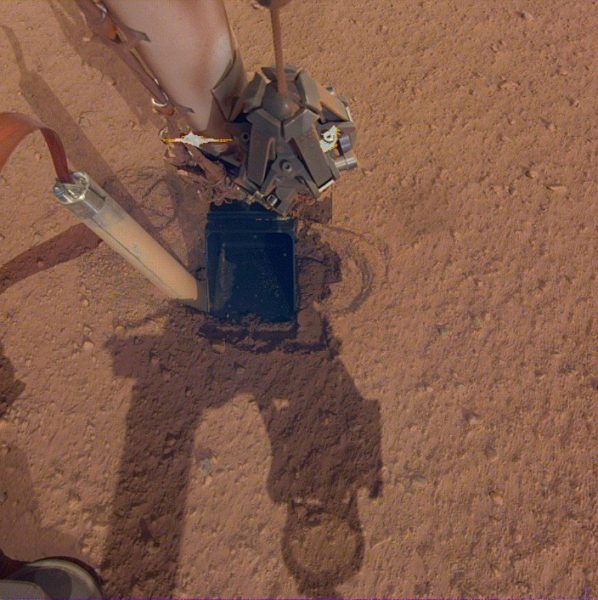
Now, the engineering team has decided to use the robot arm to press down on the probe’s back cap to encourage the mole to hammer its way below the surface. Several trial runs are expected through March to perfect the technique, all the while being careful not to contact the probe’s trailing cable.
The team also is considering the use of a scoop on the arm to dump more soil into the hole that has formed around the mole, providing still more pressure and friction.